�m�v�`�A�ڂł��n
�k�����������W�O�W�O�p�I�v�V�����{�[�h�̐���
�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`
���Z�p���N�o�ŗl����k�����������W�O�W�O�p�̃I�v�V�����{�[�h����̈˗����܂����B
���̃{�[�h�ɂ͓d�������f�q�i�|���X�C�b�`�j�����邱�ƂɂȂ�܂����B
�����Łc�B
�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`
�m��Q�Q��n
���n�t�s���߁A�h�m���̃e�X�g
���A�ڂ͑O��ŏI���������肾�����̂ł����c�B
���Z�p���N�o�ł̋g��l����o�o�h�ڑ���̎Q�l�����Ƃ��āA�y�a�R�a�`�r�h�b�̂n�t�s���߂Ƃh�m���̎��s���Ԃ̃f�[�^���~�����̂ł����A�Ƃ������[�������������܂����B
����ŊȒP�ȃe�X�g�����āA�ʐ^�ɎB���ă��[���Y�t�ł����肷����肾�����̂ł����A�������ĘA�ڋL���Ƃ��ď����Ă������Ƃł�����܂��̂ŁA�Q�l�܂łɘA�ڂ�������Ɖ������ĊF�l�ɂ����Ă����������Ƃɂ������܂����B
�k�����������W�O�W�O�̂o�o�h�ڑ��R�l�N�^�ɂo�o�h�ڑ����ڑ����ăe�X�g�v���O���������s���Ă���ʐ^�ł��B
�o�o�h�ڑ���̏o�͒[�q�ɃI�V���X�R�[�v��ڑ����ďo�͔g�`���ϑ����ł��B
���̓e�X�g�v���O�����ł��B
10 'out test1
20 OUT $E3,$80
30 OUT $E0,0
40 OUT $E0,1
50 GOTO 30
|
��������ȏ�͊ȒP�ɂł��Ȃ��Ƃ������炢�ȒP�ȃv���O�����ł��B
�Q�O�s�ło�o�h�i�W�Q�b�T�T�j�̃|�[�g���o�͂ɐݒ肵�Ă��܂��B
�R�O�s�ł`�|�[�g����O�O�O�O�O�O�O�O���o�͂��܂��B
�S�O�s�łO�O�O�O�O�O�O�P���o�͂��܂��B
�T�O�s�̂f�n�s�n���łR�O�s�ɖ߂�܂��B
���̃v���O���������s����Ƃ`�|�[�g�̃r�b�g�O����g�k�p���X���o�͂���܂��B
�o�͔g�`�̎ʐ^�ł��B
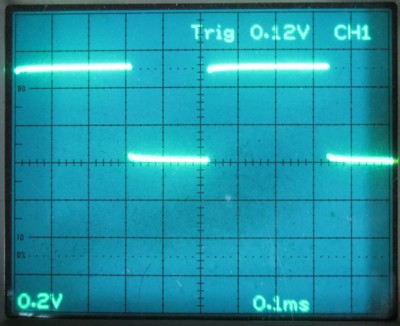
�g���O�D�R�����A�k�͂O�D�Q�����ł��B
���̂��Ƃ���n�t�s���߂̎��s���Ԃ͂P�����O�D�Q�����ŁA�f�n�s�n���͂O�D�P�����ł��邱�Ƃ��킩��܂��B
�Ƃ���ŁA��̎��s���Ԃ͎��͂n�t�s���߂�f�n�s�n���̂ق��ɂ����s����Ƃ��ɂ������Ă��܂����Ԃ��܂܂�Ă��܂��B
����͂a�`�r�h�b�C���^�v���^�̏h���̂悤�Ȃ��̂ŁA���Ƃ��a�`�r�h�b�C���^�v���^�̏ꍇ�A���̂P�s�����s���邽�тɖ����ǂ��邽�߂̍�Ƃ������܂��B
�y�a�R�a�`�r�h�b�͂n�t�s����f�n�s�n���Ȃǂ̖��ߕ��́h�n�t�s�h�A�h�f�n�s�n�h�Ƃ���������𒆊ԃR�[�h�ɒu�������Ă��܂�����A�����̂��̂���ǂ��邽�߂̎��Ԃ͂�����܂��A����ȊO�ɂ����낢�납�����Ă��鎞�Ԃ�����܂��B
�����̂Ƃ���͍H�v�ɂ���đ����͎��s���Ԃ�Z�����邱�Ƃ͉\�ł��B
�Q�l�܂łɈȉ��ɂ��̗�������܂��B
��̃v���O�����������ό`���ĉ��̃v���O�����ɂ��܂����B
10 'out test2
20 OUT $E3,$80
30 A%=0,B%=1,C%=$E0
40 OUT C%,A%
50 OUT C%,B%
60 GOTO 40
|
��������Ȃ����A�Ƃ��������ނ��낱����̃v���O�����̂ق����ʓ|�Ȃ��Ƃ�����Ă���悤�ɂ��v���܂��B
���Ƃ̃v���O�����͂h�^�n�A�h���X�́��d�O��o�͂���l�̂O�A�P���n�t�s���ɒ��ڏ����Ă��܂����A�ύX�����v���O�����ł͂����̒l����U�ϐ��ɓ��ꂽ�����łn�t�s���ł͂��̕ϐ����g���Ă��܂��B
���̃v���O���������s����ƁA���̌��ʂ͂ǂ��Ȃ�ł��傤���H
�������s���ʂł��B
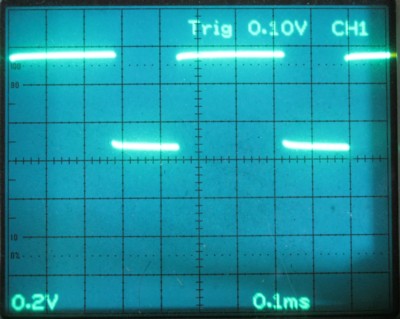
�����قǂ̌��ʂƔ�ׂĂ݂Ă��������B
�ق�̏����ł��������Ȃ��Ă���̂��킩��Ǝv���܂��B
�����قǂ̌��ʂł͂P��̂g�k�̏o�͍͂��v�O�D�T�Q�����قǂ������Ă��܂��B
���ꂪ����͂O�D�S�S�����قǂɒZ�k����܂����B
����ɂ͗��R������܂��B
�y�a�R�a�`�r�h�b�C���^�v���^�͂��Ƃ̃v���O�����̒萔�l�͂`�r�b�h�h�������̂܂܂��A�܂��͒萔�l�Ƃ��Ă̒��ԃR�[�h�ɒu�������ĕۑ����܂��B
����͌v�Z�\�ȁu���́v���l�ł͂Ȃ��ĉ��炩�̉��H���K�v�Ȓl�̂��߁A���s���ɂ͂������ǂ��Čv�Z�\�Ȓl�ɖ|�Ȃ���Ȃ�Ȃ��̂ŁA�����Ŗ��Ԃ��������Ă��܂��܂��B
�������̃v���O�����̏ꍇ�ɂ͂��̖|���Ƃ͕ϐ��ɑ������Ƃ���ōς�ł��܂��܂��B
�ϐ��ɓ����ꂽ���l�͂��̂܂܌v�Z�\�Ȑ��l�Ȃ̂ŁA����̂悤�ɕϐ���p���ċL�q�����ق����킸���ł������s���Ԃ�Z�k���邱�Ƃ��ł��܂��B
�Q�l�܂łɍŏ��̃v���O�������������̒��łǂ̂悤�Ȍ`�ŕۑ�����Ă��邩�����Ă��������܂��傤�B
>dm 8000,804f
8000 CD 51 4A D1 C9 CD 53 40-C9 CD 36 6D CD 53 40 CD �QJ���S@��6m�S@�
8010 0A 00 0B A2 6F 75 74 20-74 65 73 74 31 0D 0E 14 ...�out test1...
8020 00 09 90 24 45 33 2C 24-38 30 0D 0C 1E 00 09 90 ...$E3,$80......
8030 24 45 30 2C FA 00 00 0D-0C 28 00 09 90 24 45 30 $E0,.....(...$E0
8040 2C FA 01 00 0D 0C 32 00-04 80 1E 00 0D 07 3C 00 ,.....2.......<.
|
�E���̂`�r�b�h�h�_���v�ł킩��悤�ɂP�U�i�萔�́��d�R�A���d�O�̂悤�ɂ`�r�b�h�h�R�[�h�̂܂܂ł��B
���̕����͎��s���ɖ���A�����R�[�h�����l�ւ̕ϊ����K�v�Ȃ��ߎ��Ԃ�������܂��B
�O�A�P�Ƃ������l�̓A�h���X�W�O�R�S�`�W�O�R�U�̂e�`�O�O�O�O�A�W�O�S�P�`�W�O�S�R�̂e�`�O�P�O�O�̂悤�ɓ��ɐ����ł��邱�Ƃ������e�`���������ƂP�U�i�����̂܂܂Ŋi�[����Ă��܂��B
���̕����͂��̂܂܂ł����Ƒ������s����܂��B
���͂Q�Ԗڂ̃v���O�����̃_���v���X�g�ł��B
>dm 8000,808f
8000 CD 51 4A D1 C9 CD 53 40-C9 CD 36 6D CD 53 40 CD �QJ���S@��6m�S@�
8010 40 F4 41 25 00 54 00 77-1E 00 02 00 42 F4 42 25 @.A%.T.w....B.B%
8020 00 54 00 77 1E 00 02 00-44 F4 43 25 00 54 00 77 .T.w....D.C%.T.w
8030 1E 00 02 00 0A 00 0B A2-6F 75 74 20 74 65 73 74 .......�out test
8040 32 0D 0E 14 00 09 90 24-45 33 2C 24 38 30 0D 0C 2......$E3,$80..
8050 1E 00 18 F2 0C 00 9A FA-00 00 2C F2 18 00 9A FA ..........,.....
8060 01 00 2C F2 24 00 9A 24-45 30 0D 1B 28 00 09 90 ..,.$..$E0..(...
8070 F2 24 00 2C F2 0C 00 0D-0C 32 00 09 90 F2 24 00 .$.,.....2....$.
8080 2C F2 18 00 0D 0C 3C 00-04 80 28 00 0D 07 8A 00 ,.....<...(.....
>dm f440,f44f
F440 00 00 01 00 E0 00 76 21-F7 F1 CD 60 72 21 D0 F0 ......v!..�`r!�.
|
�R�O�s�͂W�O�T�O�`�W�O�U�a�ł��B
�擪�ɍs�ԍ��R�O�̂P�U�i���O�O�P�d������܂��B
�`�����O�͂W�O�T�Q�`�W�O�T�X�ł��B
�P�W�͂k�d�s���̒��ԃR�[�h�ł��B
�e�Q�@�O�b�@�O�O�͐����^�ϐ��������R�[�h�e�Q�ɁA���̕ϐ��̏���鑊�Έʒu�O�O�O�b���������̂ł��B
���͂��̏��ʒu�͂W�O�P�O�`�W�O�P�a�ŁA�W�O�P�O�A�W�O�P�P�͂��̕ϐ��̃�������̃A�h���X�e�S�S�O�������Ă��܂��B
�e�S�S�O�͐����ϐ��`���̃A�h���X�łW�O�P�Q�`�ɂ͕ϐ�����������Ă��܂��B
�`���ł��B
���̌��̂W�O�P�W�A�P�X�ɂ͂`�����`���Ă���s�R�O�̂P�U�i���O�O�P�d���u����Ă��܂��B
�R�O�s�̉�ǂɖ߂�܂��B
�W�O�T�U�̂X�`�́��̒��ԃR�[�h�ł��B
���̌��̂e�`�@�O�O�@�O�O�͐����萔�������e�`�ɑ����Ă��̒l�̂O�O�O�O���L�q�������̂ł��B
�S�O�s�̂n�t�s���́A�W�O�U�b�`�W�O�V�W�ɂ���܂��B
�擪�ɍs�ԍ��S�O�̂P�U�i���O�O�Q�W������܂��B
�X�O�͂n�t�s���߂̒��ԃR�[�h�ł��B
���̎��ɑ����e�Q�@�Q�S�@�O�O�A�e�Q�@�O�b�@�O�O�͏�Ő��������ϐ��̎�ނƂ��̏��̈ʒu�������l�ł��B
������ƌ��Ă��������܂����悤�ɂa�`�r�h�b�v���O�����̎��̂͌��\���G�ȍ\�������Ă��邽�߁A�}�V����v���O������������Ǝ��s���Ԃ��������Ă��܂��̂ł��B
���̃v���O���������s����ƕϐ��A�h���X�e�S�S�O�A�S�P�i�`���j�A�e�S�S�Q�A�S�R�i�a���j�A�e�S�S�S�A�S�T�i�b���j�ɂ��ꂼ��O�O�O�O�A�O�O�O�P�A�O�O�d�O������܂��B
��̃_���v���X�g�i�e�S�S�O�`�e�S�S�e�j�͂��̗l�q�������Ă��܂��B
�����̓r���ł����A���Ԃ��Ȃ��Ȃ��Ă��܂��܂����B
�����͎���ɂ������܂��B
�k�����������W�O�W�O�p�I�v�V�����{�[�h�̐���m��Q�Q��n
�Q�O�P�U�D�W�D�Q�O������������
�O��
����
�z�[���y�[�W�g�b�v�֖߂�