俹俬俠亅倀俽俛俬俷丂倳倱倝値倗丂俛俙俽俬俠
乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣
倀俽俛僀儞僞乕僼僃乕僗傪撪憼偟偨俹俬俠傪巊偭偰倂倝値倓倧倵倱僷僜僐儞偱奜晹夞楬傪惂屼偡傞偨傔偺奺庬俬乛俷婎斅偺惢嶌婰帠偱偡丅
乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣
乵戞俇俆夞乶
仠俹俬俠倀俽俛俬俷亅侽俁乮侾係乯俿倝倣倕倰侽乮俀乯俿俵俼侽俫傪俹俷俼俿俠偐傜弌椡
俿倝倣倕倰侽偼僔儞僾儖側僞僀儅乛僇僂儞僞偱偡丅
俿倝倣倕倰侽儗僕僗僞偺抣傪俼俤俙俢偡傞偙偲偱尰嵼偺僇僂儞僩抣傪撉傓偐僆乕僶僼儘乕妱傝崬傒偵傛偭偰僆乕僶乕僼儘乕傪抦傞埲奜偺婡擻偼偁傝傑偣傫丅
偦傟偩偗偱偼俿倝倣倕倰侽偺摦嶌僥僗僩偵偼側傝傑偣傫偐傜偙偙偼岺晇偑昁梫偱偡丅
偦偙偱俿倝倣倕倰侽偺抣乮忋埵僶僀僩偺抣乯傪撉傫偱偦傟傪俹俷俼俿俠偐傜弌椡偡傞傛偆偵峫偊偰傒傑偟偨丅
偦偺俹俷俼俿俠偺抣傪僆僔儘偱娤應偟偰傒傑偡丅
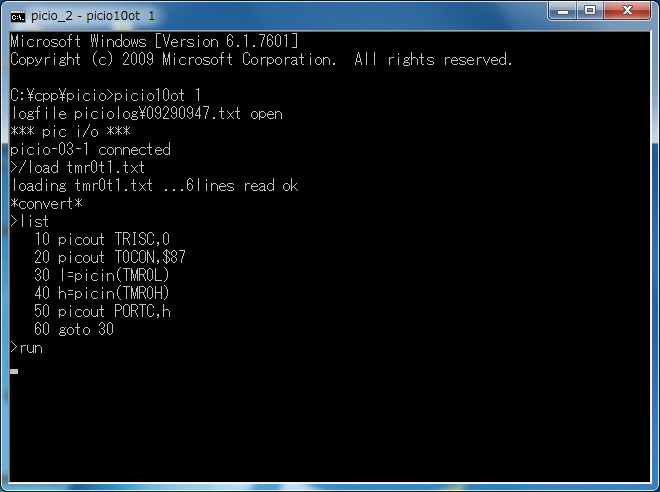
壓偑僾儘僌儔儉儕僗僩偱偡丅
偨偭偨偙傟偩偗偱偡丅
傔偭偪傖娙扨偱偡丅
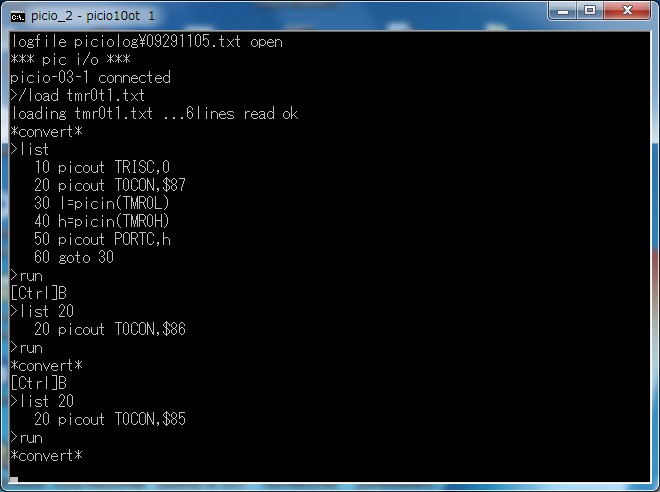
侾侽峴偱俹俷俼俿俠偺岦偒傪弌椡偵愝掕偟偰偄傑偡丅
俀侽峴偱俿倝倣倕倰侽傪愝掕偟偰偄傑偡丅
愝掕偵偮偄偰偼慜夞傪嶲徠偟偰偔偩偝偄丅
倐倝倲俈亖侾偱僇僂儞僩僗僞乕僩偱偡丅
倐倝倲俇亖侽偱侾俇倐倝倲僇僂儞僞偵巜掕偟偰偄傑偡丅
倐倝倲俆亖侽偱擖椡僋儘僢僋傪僔僗僥儉僋儘僢僋乛係乮侾俀俵俫倸乯偵巜掕偟偰偄傑偡丅
倐倝倲俁亖侽偱僾儕僗働乕儔傪巊偄傑偡丅
倐倝倲俀乣侽亖侾侾侾偱僾儕僗働乕儔偺暘廃斾傪侾丗俀俆俇偵巜掕偟偰偄傑偡丅
偙偺偲偒僋儘僢僋擖椡偼侾俀俵俫倸乛俀俆俇亖係俇丏俉俈俆俲俫倸偱偡丅
崱夞偼俿倝倣倕倰侽偺忋埵僶僀僩偺抣傪撉傒崬傫偱俹俷俼俿俠偐傜弌椡偟傑偡丅
忋埵僶僀僩乮俿俵俼侽俫乯傪撉傓偨傔偵偼愭偵壓埵僶僀僩乮俿俵俼侽俴乯傪撉傓昁梫偑偁傝傑偡乮慜夞嶲徠乯丅
偦傟偑俁侽峴乣俆侽峴偱偡丅
俇侽峴偱俁侽峴偵栠偭偰孞傝曉偟傑偡丅
慜夞傕彮偟彂偒傑偟偨偑捠忢俹俬俠偺僾儘僌儔儉偱旔偗偰捠傟側偄偺偑俠倧値倖倝倗偺愝掕偱偡丅
俹俬俠倀俽俛俬俷梡俛俙俽俬俠僀儞僞僾儕僞偼僔僗僥儉偑愝掕偟傑偡偐傜儐乕僓乕偑峫偊傞昁梫偼偁傝傑偣傫丅
俠偱偺僾儘僌儔儉偼怓乆側慜弨旛揑側愝掕偑昁梫偱偡丅
偝傜偵偄偊偽俹俬俠梡偺俠僐儞僷僀儔偼俹俬俠愱梡偱偡偐傜斈梡偺俠偵偼側偄愱梡偺愝掕偑昁梫乮側偼偢乯偱偡丅
俛俙俽俬俠僀儞僞僾儕僞偵偼偦傫側傕偺偼慡偔晄梫偱偡丅
偄偒側傝僾儘僌儔儉傪彂偄偰偄偒側傝幚峴偱偒偰偟傑偄傑偡丅
偝傜偵丄偦傕偦傕偱偡偑丅
俠僐儞僷僀儔側偳傪嬱巊偟偰俹俬俠偺偨傔偺僜乕僗僾儘僌儔儉傪彂偄偰偦偟偰偦傟傪僐儞僷僀儖偟偰柍帠偵僆僽僕僃僋僩僾儘僌儔儉偑偱偒偨偲偟傑偟偰丅
俹俬俠偵偦偺僾儘僌儔儉傪從偔偨傔偵偼俹俬俠丂倂俼俬俿俤俼偑昁梫偱偁傝傑偟傚偆丅
俹俬俠倀俽俛俬俷梡俛俙俽俬俠僀儞僞僾儕僞偵偼偦傟傕晄梫側偺偱偡丅
僾儘僌儔儉傪彂偄偨傜丄偁傞偄偼僾儘僌儔儉傪俴俷俙俢偟偨傜丄偄偒側傝俼倀俶偱偒偰偟傑偄傑偡丅
傕偆丄偁偒傟傞傎偳娙扨偱偡丅
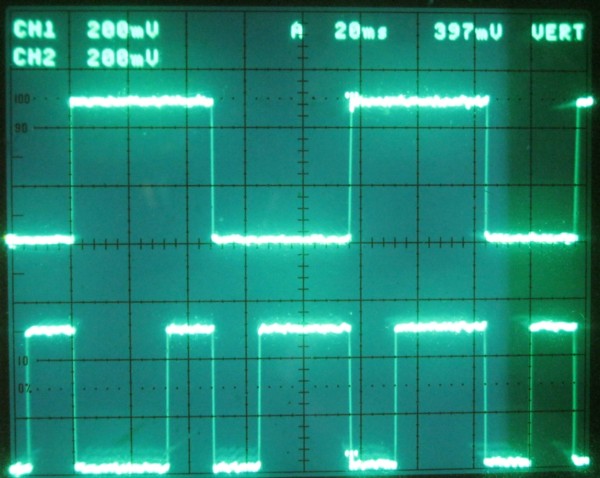
壓偼俹俷俼俿俠偺價僢僩俈乮俼俠俈乯偲價僢僩俇乮俼俠俇乯偺弌椡僷儖僗傪僆僔儘偱娤應偟偨夋憸偱偡丅
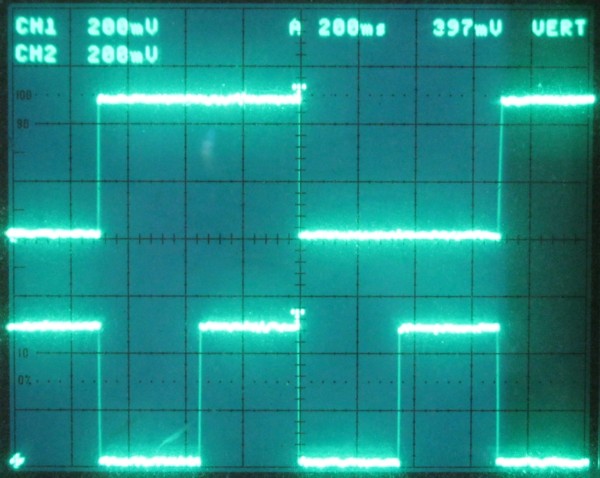
忋懁乮俠俫侾乯偑俼俠俈偱壓懁乮俠俫俀乯偑俼俠俇偱偡丅
侾俇價僢僩僇僂儞僞偺嵟忋埵價僢僩偑俼俠俈偐傜弌椡偝傟偰偄傑偡丅
僾儕僗働乕儔傪宱桼偟偨僇僂儞僞偺擖椡廃攇悢偼忋偱寁嶼偟傑偟偨丅
係俇丏俉俈俆俲俫倸偱偡丅
僇僂儞僞偺嵟忋埵價僢僩偺抣偑弌椡偝傟偰偄傞俼俠俈偺廃攇悢偼係俇俉俈俆乛俇俆俆俁俇佮俈侾俆俫倸乮廃婜偼栺侾係侽侽倣倱倕們乯偱偡丅
偦偺壓埵偺俼俠俇偺弌椡廃攇悢偼栺侾係俁侽俫倸乮廃婜偼栺俈侽侽倣倱倕們偱偡乯丅
寁嶼捠傝偺弌椡偑摼傜傟偰偄傑偡丅
僾儕僗働乕儔偺抣傪侾丗侾俀俉偵偟偰嵞幚峴偟傑偟偨丅
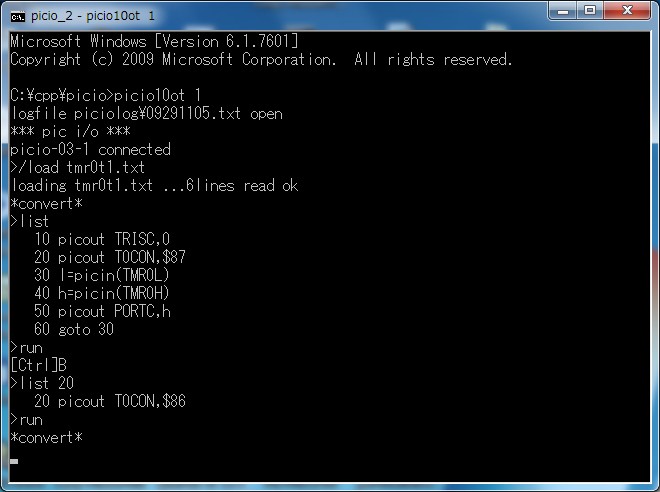
俀侽峴偺倫倝們倧倳倲丂俿侽俠俷俶丆亹俉俈傪倫倝們倧倳倲丂俿侽俠俷俶丆亹俉俇偵彂偒姺偊傞偩偗偱偡丅
俴俬俽俿丂俀侽偱俀侽峴傪昞帵偝偣偰僗僋儕乕儞僄僨傿僞偱亹俉俈傪亹俉俇偵彂偒姺偊傑偟偨丅
偦偟偰偨偩偪偵俼倀俶偱幚峴偱偒傑偡丅
傕偆堦搙彂偒傑偡偑丅
偙傫側偵娙扨側俹俬俠僾儘僌儔儉側傫偰傎偐偵偁傝傑偡偱偟傚偆偐丠
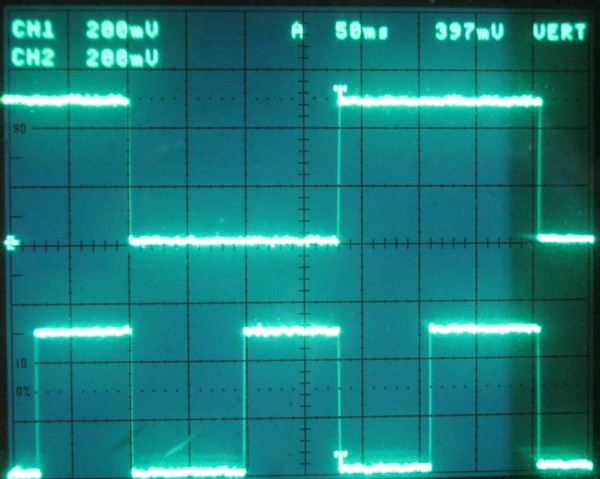
忋偺僾儘僌儔儉偺幚峴寢壥偱偡丅
僾儕僗働乕儔傪侾丗侾俀俉偵偟傑偟偨偐傜僇僂儞僞偺擖椡廃攇悢偼侾俀俵俫倸乛侾俀俉亖俋俁丏俈俆俲俫倸偵側傝傑偡丅
僇僂儞僞偺嵟忋埵價僢僩偺抣偑弌椡偝傟偰偄傞俼俠俈偺廃攇悢偼俋俁俈俆侽乛俇俆俆俁俇佮侾係俁侽俫倸乮廃婜偼栺俈侽侽倣倱倕們乯偱偡丅
偦偺壓埵偺俼俠俇偺廃攇悢偼栺俀俉俇侽俫倸乮廃婜偼栺俁俆侽倣倱倕們偱偡乯丅
偝偒傎偳偺僆僔儘夋憸偲摨偠傛偆偵尒偊傑偡偑偝偒傎偳偺夋憸偼悈暯帪娫幉偑俀侽侽倣倱偱崱夞偼侾侽侽倣倱偵側偭偰偄傑偡丅
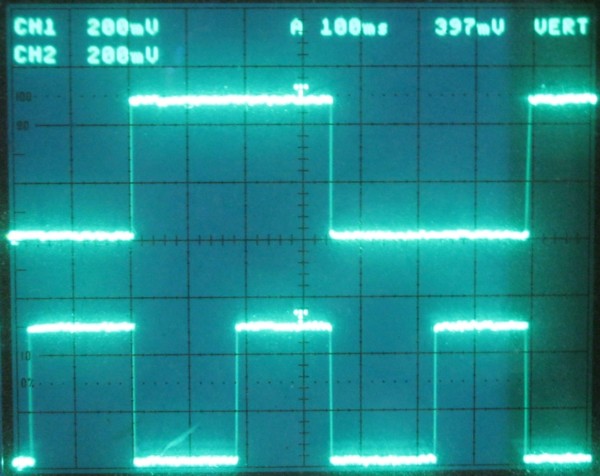
僾儕僗働乕儔偺抣傪侾丗俇係偵偟偰嵞幚峴偟傑偟偨丅
俀侽峴偺亹俉俇傪亹俉俆偵彂偒姺偊偰俼倀俶偟傑偟偨丅
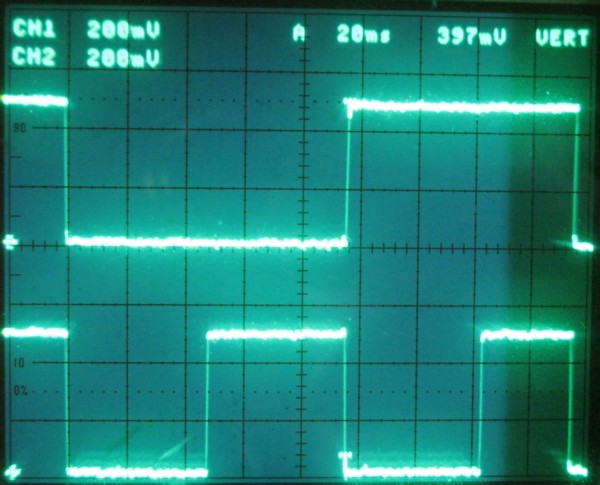
忋偺僾儘僌儔儉偺幚峴寢壥偱偡丅
僾儕僗働乕儔傪侾丗俇係偵偟傑偟偨偐傜僇僂儞僞偺擖椡廃攇悢偼侾俀俵俫倸乛俇係亖侾俉俈丏俆俲俫倸偵側傝傑偡丅
僇僂儞僞偺嵟忋埵價僢僩偺抣偑弌椡偝傟偰偄傞俼俠俈偺廃攇悢偼侾俉俈俆侽侽乛俇俆俆俁俇佮俀俉俇侽俫倸乮廃婜偼栺俁俆侽倣倱倕們乯偱偡丅
偦偺壓埵偺俼俠俇偺廃攇悢偼栺俆俈俀侽俫倸乮廃婜偼栺侾俈俆倣倱倕們偱偡乯丅
偝偒傎偳偺僆僔儘夋憸偲摨偠傛偆偵尒偊傑偡偑偝偒傎偳偺夋憸偼悈暯帪娫幉偑侾侽侽倣倱偱崱夞偼俆侽倣倱偵側偭偰偄傑偡丅
僾儕僗働乕儔偺抣傪侾丗俁俀偵偟偰嵞幚峴偟傑偟偨丅
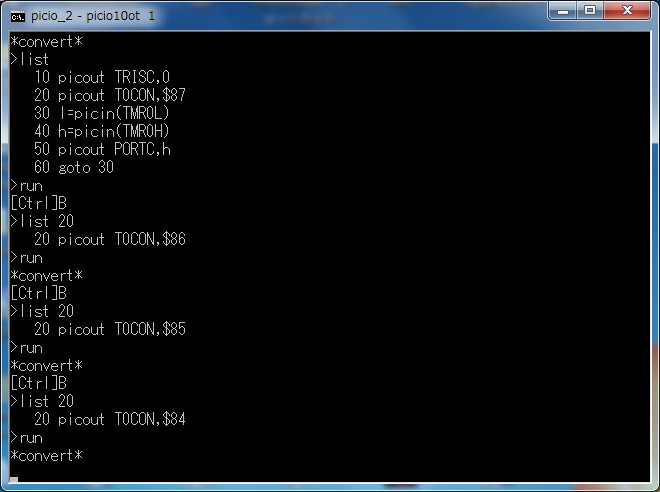
俀侽峴偺亹俉俆傪亹俉係偵彂偒姺偊偰俼倀俶偟傑偟偨丅
忋偺僾儘僌儔儉偺幚峴寢壥偱偡丅
僾儕僗働乕儔傪侾丗俁俀偵偟傑偟偨偐傜僇僂儞僞偺擖椡廃攇悢偼侾俀俵俫倸乛俁俀亖俁俈俆俲俫倸偵側傝傑偡丅
僇僂儞僞偺嵟忋埵價僢僩偺抣偑弌椡偝傟偰偄傞俼俠俈偺廃攇悢偼俁俈俆侽侽侽乛俇俆俆俁俇佮俆俈俀俀俫倸乮廃婜偼栺侾俈俆倣倱倕們乯偱偡丅
偦偺壓埵偺俼俠俇偺廃攇悢偼栺侾侾係係係俫倸乮廃婜偼栺俉俈倣倱倕們偱偡乯丅
僆僔儘偺悈暯帪娫幉偼俀侽倣倱偱偡丅
僾儕僗働乕儔偺抣傪侾丗侾俇偵偟偰嵞幚峴偟傑偟偨丅
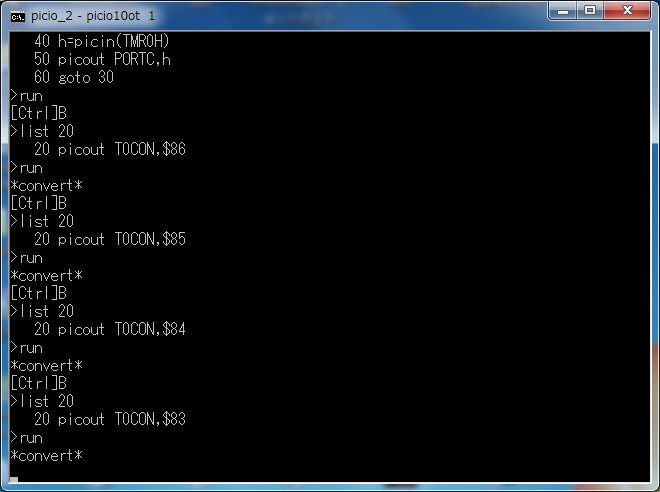
俀侽峴偺亹俉係傪亹俉俁偵彂偒姺偊偰俼倀俶偟傑偟偨丅
忋偺僾儘僌儔儉偺幚峴寢壥偱偡丅
僾儕僗働乕儔傪侾丗侾俇偵偟傑偟偨偐傜僇僂儞僞偺擖椡廃攇悢偼侾俀俵俫倸乛侾俇亖俈俆侽俲俫倸偵側傝傑偡丅
僇僂儞僞偺嵟忋埵價僢僩偺抣偑弌椡偝傟偰偄傞俼俠俈偺廃攇悢偼俈俆侽侽侽侽乛俇俆俆俁俇佮侾侾係係係俫倸乮廃婜偼栺俉俈倣倱倕們乯偱偡丅
偦偺壓埵偺俼俠俇偺廃攇悢偼栺俀俀俉俉俉俫倸乮廃婜偼栺係係倣倱倕們偱偡乯丅
僆僔儘偺悈暯帪娫幉偼俀侽倣倱偱偡丅
攇宍傪尒傞偲俠俫侾偼嵍懁偺侾攇偼俋俀乣俋俇倣倱偖傜偄偱師偺侾攇偼俉侽倣倱偪傚偆偳偖傜偄偵尒偊傑偡丅
俀攇傪崌傢偣傞偲侾俈俇倣倱偖傜偄側偺偱戝懱寁嶼偑崌偄傑偡丅
俠俫俀偼俠俫侾偵偼摨婜偟偰偄傑偡偑僨儏乕僥傿斾偑俆侽亾偐傜偐側傝偢傟偰偄傑偡丅
偙傟偼俿倝倣倕倰侽偺岆嵎偱偼偁傝傑偣傫丅
棟桼偑偁傝傑偡丅
偦偺尨場偼倀俽俛捠怣偱偡丅
俹俬俠倀俽俛俬俷梡偺俛俙俽俬俠僀儞僞僾儕僞偺倀俽俛捠怣偼俫俬俢曽幃偱偡丅
俫俬俢曽幃偼摿暿偺僪儔僀僶傪僀儞僗僩乕儖偡傞昁梫偑側偔娙曋側偺偱偡偑寚揰偼捠怣懍搙偑抶偄偙偲偱偡丅
偦傟傪妋擣偡傞偨傔偵壓偺僾儘僌儔儉傪幚峴偟偰傒傑偟偨丅
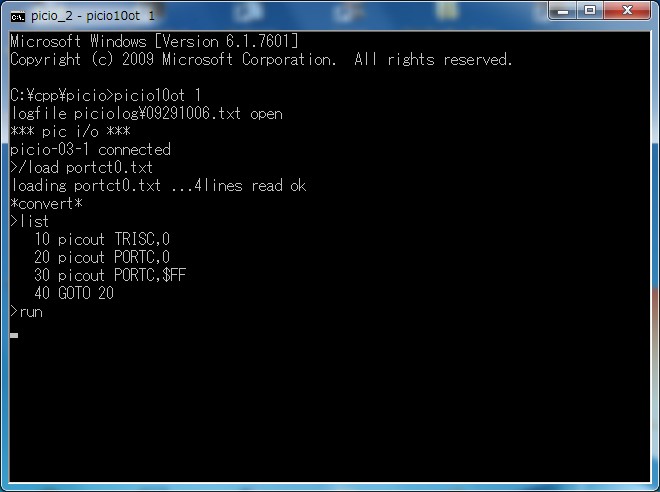
俹俷俼俿俠偐傜侽侽偲俥俥傪岎屳偵弌椡偡傞偩偗偺僾儘僌儔儉偱偡丅
忋偺僾儘僌儔儉偺幚峴寢壥偱偡丅
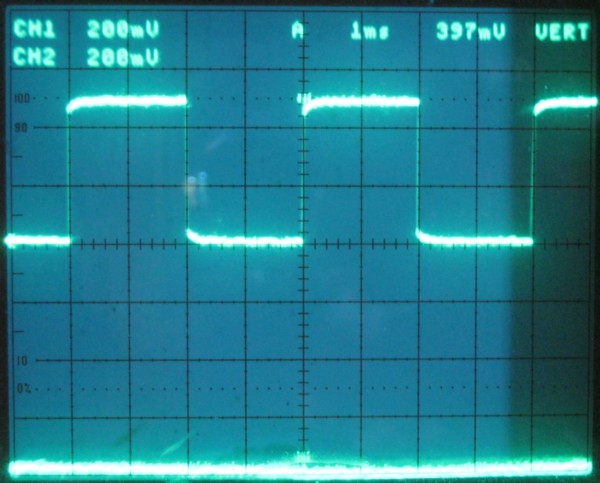
俹俷俼俿俠偵侾夞傾僋僙僗偡傞偺偵俀倣倱偐偐偭偰偄傑偡丅
偙傟偑俹俬俠倀俽俛俬俷梡俛俙俽俬俠僀儞僞僾儕僞偺偪傚偭偲庛偄偲偙傠偱偡丅
俿倝倣倕倰侽偺僾儘僌儔儉偱偼俿俵俼侽俴偵傾僋僙僗偟偰師偵俿俵俼侽俫偵傾僋僙僗偟偰師偵俹俷俼俿俠偵傾僋僙僗偟偰偦傟傪孞傝曉偟傑偡丅
偮傑傝俹俷俼俿俠偐傜僨乕僞傪侾夞弌椡偡傞偺偵俇倣倱偐偐傞寁嶼偱偡丅
偦偺廃婜偑挿偄偲偒偼栚棫偪傑偣傫偑偝偡偑偵廃婜偑俉俉倣倱丄係係倣倱偲偄偆偙偲偵側傞偲偦偺塭嬁偼柍帇偱偒側偔側傝傑偡丅
崱夞偺俿倝倣倕倰侽偺僥僗僩僾儘僌儔儉偱偼僾儕僗働乕儔傪巊偭偰偝傜偵侾俇價僢僩儌乕僪偱偦偺忋埵僶僀僩偺僨乕僞傪撉傫偱偦傟傪俹俷俼俿俠偐傜弌椡偡傞傛偆偵偟偨偺偼偦偺棟桼偐傜偱偡丅
抶偄両抶夁偓傞両
偲偍峫偊偐傕偟傟傑偣傫偑丅
俹俬俠倀俽俛俬俷梡俛俙俽俬俠傪俹俬俠偺擖栧梡僣乕儖偲偟偰峫偊傟偽抶偄偲偄偆寚揰傪杽傔偰傕側偍梋傝偁傞棙揰偑戝偄偵偁傞偲巚偆偺偱偡偑偄偐偑偱偟傚偆偐丠
俹俬俠倀俽俛俬俷梡俛俙俽俬俠僀儞僞僾儕僞偺倫倝們倧倳倲丄倫倝們倝値傪巊偭偰俹俬俠偺儗僕僗僞偵捈愙傾僋僙僗偡傞偲偄偆帋傒偼傑偩巒傑偭偨偽偐傝偱偡丅
夞偑恑傓偵偮傟偰丄偒偭偲乽偄偄偧丄偄偄偠傖側偄偺乿偲巚偭偰偄偨偩偗傞偲妋怣偟偰偍傝傑偡丅
俹俬俠亅倀俽俛俬俷丂倳倱倝値倗丂俛俙俽俬俠乵戞俇俆夞乶
俀侽俀俀丏俋丏俀俋倳倫倢倧倎倓
慜傊
師傊
儂乕儉儁乕僕僩僢僾傊栠傞