慜夞偼扨弮偵僥僗僩僨乕僞乮俉價僢僩偺暥帤僐乕僪乯傪憲庴怣偟偨偩偗偱偟偨偑偦偙偺偲偙傠傪堄枴偺偁傞暥帤楍偺憲庴怣偵曄偊傑偟偨丅
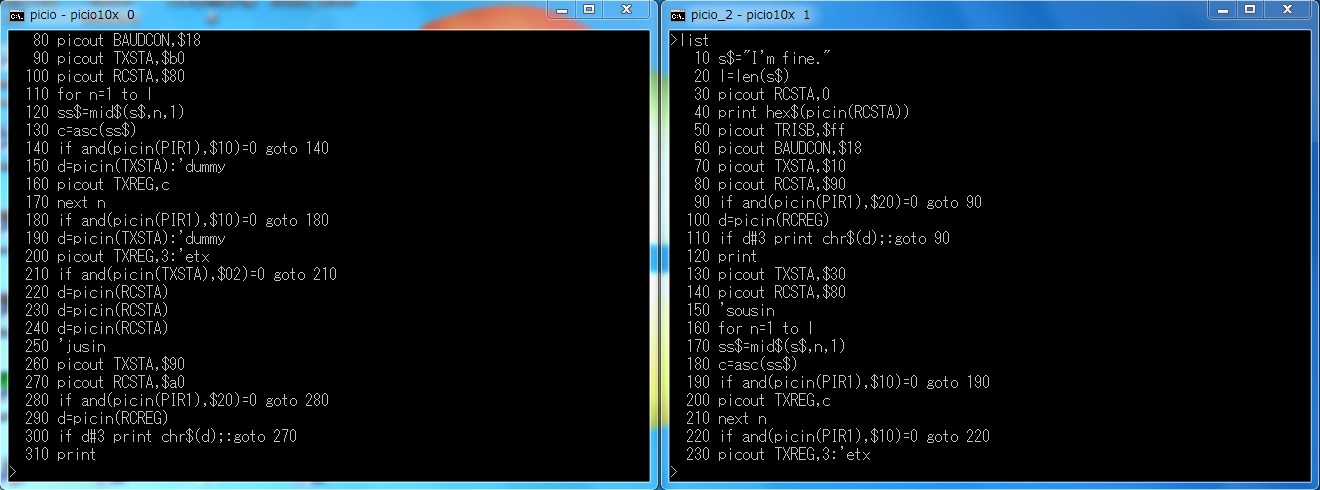
侾侽峴偐傜俀侾侽峴傑偱偑儅僗僞乕偑憲怣偟偰僗儗乕僽偑偦傟傪庴怣偡傞儌乕僪偱偺儅僗僞乕懁偺僾儘僌儔儉偱偡丅
侾侽峴偱暥帤曄悢倱亹偵暥帤楍傪掕媊偟傑偡丅
侾俀侽峴偱偦偺暥帤楍偺愭摢偐傜弴偵侾暥帤傪愗傝弌偟傑偡丅
俵俬俢亹偼暥帤楍偐傜擟堄偺暥帤楍傪愗傝弌偡娭悢偱偡丅
侾俁侽峴偱偦偺侾暥帤傪俉價僢僩偺暥帤僐乕僪偵曄姺偟傑偡丅
俙俽俠乮乯偼侾暥帤傪侾僶僀僩偺暥帤僐乕僪偵曄姺偡傞娭悢偱偡丅
侾俇侽峴偱偦偺暥帤僐乕僪傪憲怣偟傑偡丅
慜夞偺僾儘僌儔儉偵偼偁傝傑偣傫偱偟偨偑崱夞偼憲怣偺慜偵僟儈乕柦椷乮侾俆侽峴丄侾俋侽峴乯傪擖傟傑偟偨丅
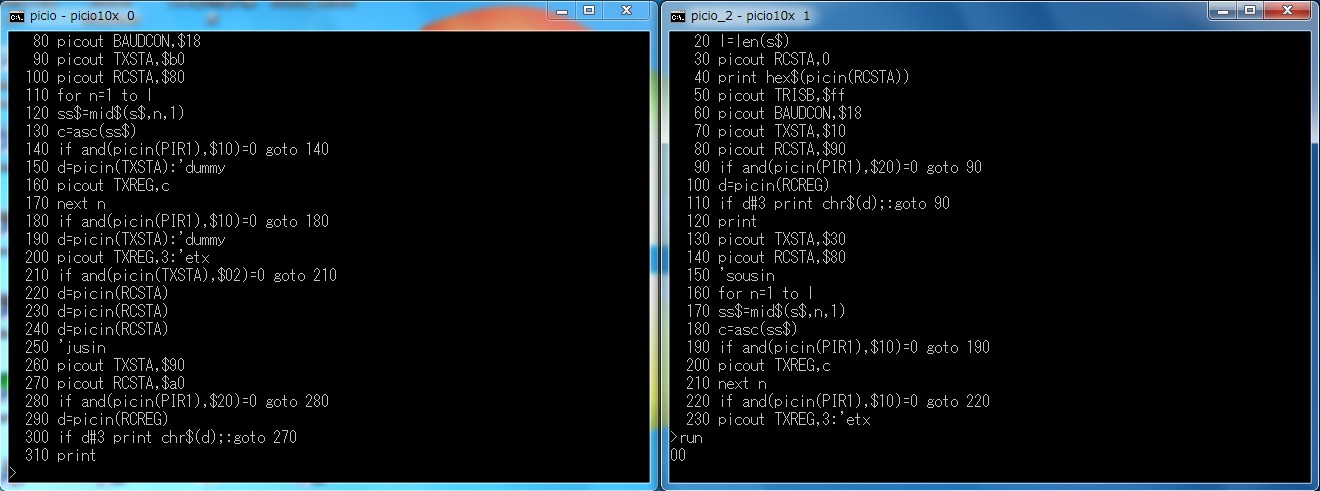
慜夞傛傝傕庴怣懁偺張棟偵帪娫偑偐偐傞傛偆偱偙傟乮栺俇乣俉倣倱倕們偺帪娫懸偪乯偑側偄偲惓偟偔憲庴怣偱偒傑偣傫丅
僨乕僞楍傪憲怣偟廔傢偭偨偲偙傠偱僄儞僪僐乕僪乮侽俁乯傪憲傝傑偡乮俀侽侽峴乯丅
俀俆侽峴偐傜俁侾侽峴傑偱偑屻敿晹暘偱偡丅
偙偙偼僗儗乕僽偑憲怣偟偰儅僗僞乕偑庴怣偡傞儌乕僪偺儅僗僞乕懁偺僾儘僌儔儉偱偡丅
俀俋侽峴偱庴怣僨乕僞傪曄悢倓偵擖傟傑偡丅
俁侽侽峴偱倓偺抣傪暥帤偵曄姺偟偰倫倰倝値倲暥偱昞帵偟傑偡丅
俠俫俼亹乮乯偼侾僶僀僩偺僐乕僪傪暥帤僐乕僪偲傒側偟偰懳墳偡傞暥帤偵曄姺偡傞娭悢偱偡丅
俁侽侽峴偱偼摨帪偵僨乕僞楍偺廔傢傝偺専弌傕峴側偭偰偄傑偡丅
乫仈乫偼乫僲僢僩丂僀僐乕儖乫偱偡丅
晛捠偺俛俙俽俬俠偱偼亙亜傪巊偆傕偺偑懡偄偲巚偄傑偡丅
庴怣懁偺僾儘僌儔儉偼壓偺塃懁偺夋柺偺儕僗僩偱愢柧傪偟傑偡丅
儅僗僞乕懁偺僾儘僌儔儉偲偼憲怣庴怣偺弴彉偑媡偵側偭偰偄傞偩偗偱傗偭偰偄傞偙偲偼摨偠偱偡丅
侾侽峴偐傜侾俀侽峴傑偱偑儅僗僞乕偑憲怣偟偰僗儗乕僽偑偦傟傪庴怣偡傞儌乕僪偱偺僗儗乕僽懁偺僾儘僌儔儉偱偡丅
侾俁侽峴偐傜俀俁侽峴傑偱偑屻敿晹暘偱偡丅
偙偙偼僗儗乕僽偑憲怣偟偰儅僗僞乕偑庴怣偡傞儌乕僪偺僗儗乕僽懁偺僾儘僌儔儉偱偡丅
愭偵塃懁乮僗儗乕僽乯偺僾儘僌儔儉傪幚峴偟傑偟偨丅
師偵嵍懁乮儅僗僞乕乯偺僾儘僌儔儉傪幚峴偟傑偟偨丅
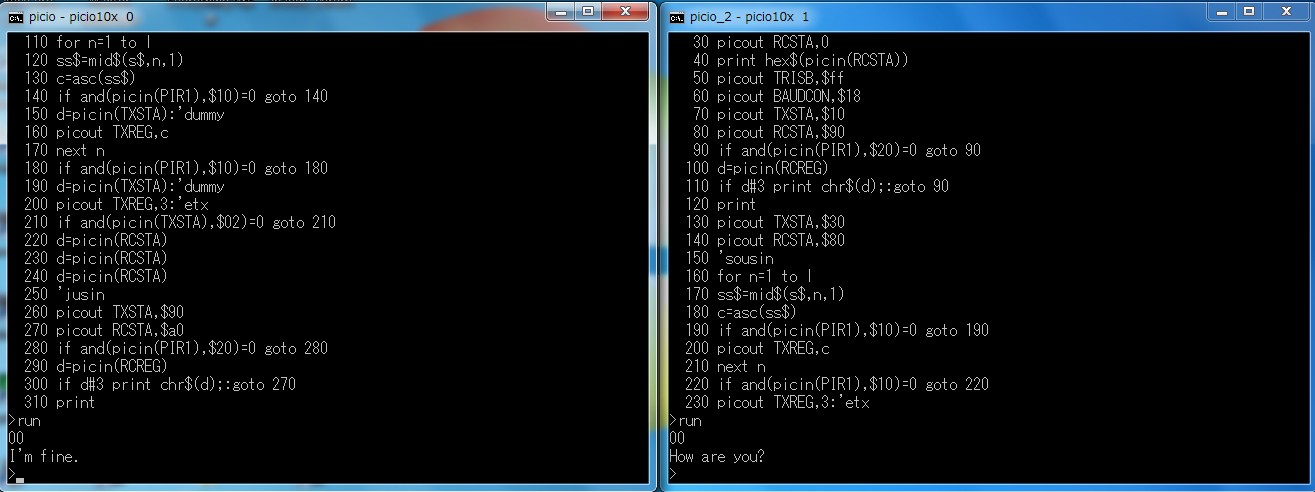
僾儘僌儔儉偼弖帪偵幚峴偝傟偰尒偨栚偵偼嵍懁偺夋柺偲塃懁偺夋柺偵摨帪偵暥帤楍偑昞帵偝傟偨傛偆偵尒偊傑偡丅
幚嵺偼愭偵塃懁偵乭俫倧倵丂倎倰倕丂倷倧倳丠乭偲昞帵偝傟偨屻偱嵍懁偵乭俬乫倣丂倖倝値倕丏乭偲昞帵偝傟傞偺偱偡偑恖娫偺栚偵偼摨帪偵昞帵偝傟偨傛偆偵偟偐尒偊傑偣傫丅
俹俬俠亅倀俽俛俬俷丂倳倱倝値倗丂俛俙俽俬俠乵戞侾俇俇夞乶
俀侽俀俁丏侾丏俀俆倳倫倢倧倎倓
慜傊
師傊
儂乕儉儁乕僕僩僢僾傊栠傞