仠倅俉侽斉俿俲俉侽偺夞楬
倅俉侽偼婡夿岅僐乕僪儗儀儖偱偼俉侽俉侽偲姰慡側乮忋埵乯屳姺惈傪桳偟偰偄傑偡丅
俉侽俉侽偺偨傔偵彂偐傟偨婡夿岅偺僾儘僌儔儉偼慡偔庤捈偟偡傞偙偲側偔丄偦偺傑傑幚峴偡傞偙偲偑偱偒傑偡丅
偱偡偐傜丄慜夞丄幨恀傪偍尒偣偟傑偟偨傛偆偵丄俵倄俠俹倀俉侽乮俉侽俉侽屳姺乯夞楬偱摦嶌偟偰偄傞俿俲俉侽儌僯僞俼俷俵傪幚憰偟偰丄俿俲俉侽偲摨偠摦嶌傪偝偣傞偙偲偑偱偒偨偺偱偡丅
偲偄偄傑偟偰傕丄偦傟偼偁偔傑偱僜僼僩僂僃傾忋偺偙偲偱丄僴乕僪僂僃傾夞楬傑偱摨偠丄偲偄偆傢偗偵偼偄偒傑偣傫丅
俉侽俉侽偼亄俆倁偺傎偐偵亄侾俀倁偍傛傃亅俆倁偺俁揹尮偑昁梫偱丄偝傜偵俠俹倀偵嫙媼偡傞僋儘僢僋傕兂侾丄兂俀偺俀憡僋儘僢僋偑昁梫偱丄偍傑偗偵偦偺僋儘僢僋偼亄俆倁偱偼側偔偰丄亄侾俀倁偱偁傞昁梫偑偁傝傑偟偨乮侽倁偐傜亄侾俀倁傑偱僼儖僗僀儞僌偡傞俵俫倸僋儘僢僋側傫偰丄傕偆偲偰傕椳側偔偟偰偼岅傟傑偣傫丄偱偟偨乯丅
側傫偲傕埖偄偵偔偄俠俹倀偩偭偨傢偗偱偡偑丄偦傟偵斾傋傞偲倅俉侽偼亄俆倁扨堦揹尮偱摦嶌偟丄俠俹倀僋儘僢僋傕亄俆倁偺扨憡僋儘僢僋偱摦嶌偟傑偡偐傜丄偦偺偙偲偩偗偱傕丄僴乕僪僂僃傾夞楬偺忋偱偼俉侽俉侽偲倅俉侽偼慡偔堎側偭偰偄傑偡丅
偲偄偆偐丄傾僪儗僗儔僀儞偑侾俇杮偱僨乕僞儔僀儞偑俉杮偱偁傞丄偲偄偆偙偲偺傎偐偼丄俉侽俉侽偲倅俉侽偼慡偔嫟捠揰偑側偄丄偲尵偭偨傎偆偑揔愗側傎偳丄僴乕僪僂僃傾偺忋偱偼椉幰偼堎側偭偰偄傑偟偨丅
摉慠偺偙偲側偑傜丄儊儌儕傗俬乛俷偵懳偟偰傕丄夞楬偼俉侽俉侽偲倅俉侽偱偼堎側偭偰偔傞偺偱偡偗傟偳丄偦傟偼傑偁嫋梕偺斖埻偱偡丅
俿俲俉侽偺夞楬傪倅俉侽偱峫偊傞偆偊偱丄栤戣偵側偭偰偔傞偺偑丄俈倱倕倗倣倕値倲俴俤俢偺昞帵夞楬偲丄僾儘僌儔儉偺僗僥僢僾摦嶌偺夞楬偱偡丅
偁丅偦傟偵偮偄偰丄愢柧偡傞慜偵傑偢丄崱夞愝寁偟偨倅俉侽斉俿俲俉侽偺慡懱偺夞楬傪傑偢偍尒偣偡傞偙偲偵偄偨偟傑偟傚偆丅
仠倅俉侽俠俹倀夞楬
傑偢偼倅俉侽廃曈偺夞楬恾偱偡丅
恾偺嵍壓晹暘偑僗僥僢僾夞楬偱偡丅
偙傟偵偮偄偰偼偺偪傎偳愢柧傪偄偨偟傑偡丅
仠俼俷俵偍傛傃俼俙俵夞楬
俼俷俵偍傛傃俼俙俵夞楬偼俵倄俠俹倀俉侽偺夞楬偲傎偲傫偳摨偠偱偡丅
仠俬乛俷夞楬
俬乛俷夞楬傕婎杮揑偵偼俵倄俠俹倀俉侽偺夞楬偲摨偠偱偡丅
俵倄俠俹倀俉侽偲堎側偭偰偄傞偺偼丄傑偢俉俀俠俆俆偑捛壛偝傟偰偄傞偙偲偲丄僔儕傾儖擖弌椡偑倀俽俛偱偼側偔偰俼俽俀俁俀俠怣崋偵側偭偰偄傞揰偱偡丅
偦傟偲僾儕儞僞弌椡乮夞楬偺堦斣忋晹暘乯偑偁傞偙偲偱偡丅
仠俆亊俆僉乕儃乕僪夞楬
偙偙偼俵倄俠俹倀俉侽偺夞楬偲慡偔摨偠偱偡丅
仠俈僙僌儊儞僩俴俤俢昞帵夞楬
俈僙僌儊儞僩昞帵夞楬偼丄俵倄俠俹倀俉侽偺夞楬偲帡偰偄傑偡偑丄摦嶌偺巇慻傒偼堎側偭偰偄傑偡丅
俵倄俠俹倀俉侽偼丄俴俤俢昞帵僨乕僞傪儔僢僠偡傞偺偵丄柦椷偺乽寗娫乿傪棙梡偟偰丄偄傢備傞乽僒僀僋儖僗僠乕儖乿曽幃偱峴偭偰偄傑偟偨丅
偙傟偵懳偟偰丄俿俲俉侽偼俲俫倸僆乕僟乕偱俠俹倀傪堦帪掆巭偝偣偰丄偦偺娫偵儊儌儕偐傜俴俤俢昞帵僨乕僞傪撉傒弌偟偰儔僢僠偡傞丄偲偄偆夞楬偵側偭偰偄傑偟偨丅
崱夞偺倅俉侽斉俿俲俉侽傕丄偦偺俿俲俉侽偺曽幃偲摨偠峫偊曽偺夞楬偱偡丅
俿俲俉侽偲摨偠傛偆偵僞僀儅乕俬俠偺俆俆俆傪巊偭偰俛倀俽俼俻乮僶僗儕僋僄僗僩怣崋乯傪敪惗偝偣傑偡丅
俆俆俆偼崱偱傕尰栶側偺偱偡偹丅偪傚偭偲嬃偒偱偡丅
俵倄俠俹倀俉侽偱偼丄俠俹倀偺懁偱僒僀僋儖僗僠乕儖偺偨傔偺夞楬傪梡堄偟傑偟偨偐傜丄俛倀俽俼俻偺偨傔偺怣崋偼揔摉側僨儏乕僥傿偱椙偐偭偨偨傔丄俈係俫俠侽係傪棙梡偟偨俼俠敪怳夞楬傪巊偄傑偟偨偑丄崱夞偺倅俉侽偵懳偡傞俛倀俽俼俻怣崋偼丄悢昐俫倸偺敪怳廃攇悢偑昁梫偱丄側偍偐偮旕忢偵暆偺嫹偄僷儖僗偑昁梫偱偡偺偱丄偦傟傪僎乕僩俬俠偱嶌傝弌偡偺偼偪傚偭偲柺搢偱偡丅
偲偄偆偙偲偱丄俿俲俉侽偲摨偠傛偆偵俆俆俆傪巊偆偙偲偵偟傑偟偨丅
嶲峫傑偱偵丅俆俆俆偺僨乕僞僔乕僩乮偺堦晹乯偱偡
仠俴俵俠俆俆俆偺僨乕僞僔乕僩乮堦晹乯
乵弌揟乶俶倎倲倝倧値倎倢丂俽倕倣倝們倧値倓倳們倲倧倰幮俴俵俠俆俆俆倓倎倲倎倱倛倕倕倲
俆俆俆偼弌椡僷儖僗偺俫偲俴偺暆傪奜晅掞峈偲僐儞僨儞僒偺抣偐傜娙扨偵媮傔傞偙偲偑偱偒傞偺偱丄崱夞偺傛偆側梡搑偵偼傑偙偲偵桳擄偄俬俠偱偡丅
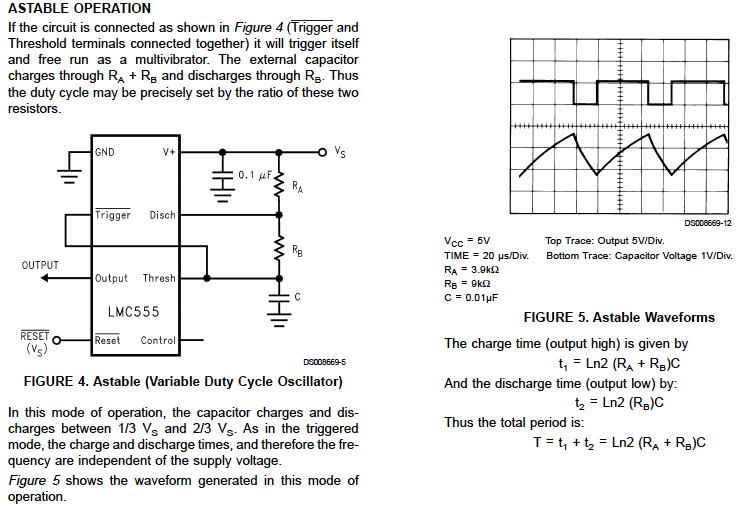
僨乕僞僔乕僩偵偁傝傑偡傛偆偵丄弌椡僷儖僗偺俫偺婜娫乮倲侾乯偼丄倲侾亖侽丏俈亊乮俼俙亄俼俛乯亊俠偱媮傔傜傟傑偡丅
俴値俀佮侽丏俈偱偡丅
傑偨俴偺婜娫乮倲俀乯偼丄倲俀亖侽丏俈亊俼俛亊俠偱媮傔傜傟傑偡丅
崱夞偺夞楬偱偼丄俼俙亖俀侽侽俲兌丄俼俛亖俀丏俀俲兌丄俠亖侽丏侽侾兪俥偱偡偐傜丄
倲侾亖侽丏俈亊俀侽俀俀侽侽亊侽丏侽侾佮侾係侽侽乮兪倱乯
倲俀亖侽丏俈亊俀俀侽侽亊侽丏侽侾佮侾俆乮兪倱乯
偵側傝傑偡丅
幚嵺偵應掕偟偨俆俆俆偐傜偺弌椡攇宍偱偡丅
仠俆俆俆偺弌椡攇宍
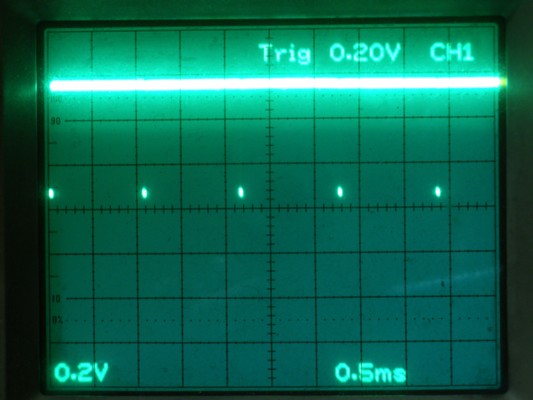
侾丏係倣倱偵偼彮偟懌傝側偄傛偆偱偡丅侾丏俀倣倱掱搙偺傛偆偵尒偊傑偡丅
俴偺晹暘傪奼戝偟偰傒傑偟偨丅
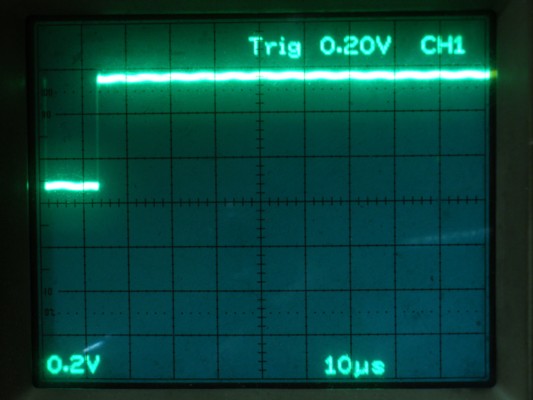
傕偆彮偟奼戝偟偰傒傑偡丅

偙偪傜傕侾俆兪倱偵偼懌傝傑偣傫丅侾俀兪倱偔傜偄偱偡丅
偛偔僼僣乕偺僙儔儈僢僋僐儞僨儞僒偱偡偐傜丄傑偁偙傫側傕偺偱偟傚偆丅
偲偙傠偱丄側偤偙傫側怣崋偑昁梫側偺偱偟傚偆偐丠
俈僙僌儊儞僩昞帵夞楬偵偮偄偰偼俿俿俴偱俠俹倀傪偮偔傠偆乵戞侾俀侽夞乶乣乵戞侾俀俀夞乶偱愢柧傪偟偰偄傑偡丅
偪傚偄偲偍偝傜偄傪偟傑偡偲丄俉寘暘偺俈僙僌儊儞僩俴俤俢偼偄偮傕慡晹偺寘偑揰摂偟偰偄傞偺偱偼側偔偰丄侾昩娫偵悢昐夞偲偄偆懍偝偱侾寘偢偮愗傝姺偊偰揰摂偝偣偰偄傞偺偱偡丅
偙偺傛偆側昞帵曽朄傪僟僀僫儈僢僋揰摂乮僟僀僫儈僢僋僪儔僀僽乯偲偄偄傑偡丅
偦傟偵懳偟偰忢帪慡寘傪昞帵偝偣傞曽朄傪僗僞僥傿僢僋揰摂乮僗僞僥傿僢僋僪儔僀僽乯偲偄偄傑偡丅
僟僀僫儈僢僋揰摂偼丄昞帵傪愗傝姺偊傞偨傔偺夞楬偑昁梫偵側傝傑偡偑丄俿俲俉侽偺夞楬偱偼丄昞帵僨乕僞偼儊儌儕偵抲偄偰偄傑偡偐傜丄儊儌儕偐傜僨乕僞傪昞帵夞楬偵憲傞偲偙傠偼丄慡寘摨帪偵偼峴偊傑偣傫丅
堦搙偵偼堦寘暘偺昞帵僨乕僞偟偐撉傒弌偡偙偲偑偱偒傑偣傫偐傜丄僟僀僫儈僢僋昞帵偺傎偆偑搒崌偑傛偄偺偱偡丅
偝偰丄偱偼丄堦懱偳偺偔傜偄偺懍偝偱昞帵傪愗傝姺偊偨傜傛偄偺偱偟傚偆偐丅
僟僀僫儈僢僋揰摂偼恖娫偺栚偺巆憸尰徾傪棙梡偟偰偄傑偡丅
幚嵺偵偼俴俤俢偺奺寘偼侾乛俉偺婜娫偟偐揰摂偟偰偄側偄偺偱偡偑丄偦偺孞傝曉偟傪懍偔峴偆偲丄恖娫偺栚偱偼忢帪揰摂偟偰偄傞傛偆偵尒偊偰偟傑偄傑偡丅
傕偪傠傫丄孞傝曉偟偺懍搙傪抶偔偟偰偄偔偲丄偪傜偮偒傪姶偠傞傛偆偵側傝傑偡丅
戝懱侾昩娫偵俀侽乣俁侽夞埲忋偺揰柵夞悢偵側傞偲丄偪傜偮偒偼傎偲傫偳姶偠側偔側傞傛偆偱偡丅
偦傟傪彮偟懡傔偵峫偊偰丄侾昩娫偵俆侽夞埲忋孞傝曉偡偙偲偵偟傑偡丅
偡傞偲丄偦偺侾夞偺娫偵俉寘傪弴師揰摂偝偣側偗傟偽偄偗傑偣傫偐傜丄奺寘傪揰摂偝偣傞偨傔偺僷儖僗偼俆侽亊俉亖係侽侽俫倸埲忋偺廃攇悢偑昁梫偵側傝傑偡丅
崱夞偺俆俆俆偺弌椡僷儖僗偼丄侾乛侽丏侽侽侾俀佮俉俁侽俫倸偱偡偐傜丄偙偺敿暘偺廃攇悢偱傕傛偄偙偲偵側傝傑偡偑丄傑偁偙偺偔傜偄偺傎偆偑埨慡僒僀僪偲偄偆偙偲偵側傝傑偡丅
偪傚偭偲傾僶僂僩側偺偱偡偑丄偠偮偼偙傟偵偼掞峈偲僐儞僨儞僒偺抣偑娭學偟偰偄傞偺偱偡丅
偨偲偊偽係侽侽俫倸掱搙偺弌椡僷儖僗傪摼傛偆偲偡傞偲丄掞峈偐僐儞僨儞僒偺抣傪尰峴偺俀攞偵偡傞昁梫偑偁傝傑偡丅
掞峈偵偮偄偰偼俀侽侽俲兌偼偪傚偭偲戝偒偡偓傞偐側偁偲巚偄偮偮巇曽側偔巊偭偨偺偱丄偙傟傪係侽侽俲兌偵偡傞丄偲偄偆偺偼偪傚偭偲峫偊偨偔偼偁傝傑偣傫丅
僐儞僨儞僒傪侽丏侽俀兪俥偵偡傞偙偲偼壜擻側偺偱偡偑丄偠偮偼嵟嬤僙儔儈僢僋僐儞僨儞僒偑巗応偐傜徚偊偰偒偰偄傑偡乮側傫側偺偱偟傚偆偐丠側偵偐傎傫偲偵擔杮偼偪傚偭偲偍偐偟偄偺偱偼偁傝傑偣傫偐丠乯丅
偦偆偄偆拞偱偼丄僙儔儈僢僋僐儞僨儞僒偺庬椶偼嬌椡偟傏傝偨偄丄偲峫偊偰偄傑偡丅
巹偑僗僞儞僟乕僪偱巊偭偰偄傞僙儔儈僢僋僐儞僨儞僒偼丄俀俀倫俥丄俆俇倫俥丄侾侽侽倫俥丄俀俈侽倫俥丄侾侽侽侽倫俥偲丄崱夞偺侽丏侽侾兪俥側偺偱丄偦偙偵侽丏侽俀兪俥傪捛壛偟偨偔偼側偄丄偲偄偆乽偍壠偺帠忣乿偑偁傞偺偱偡丅
偦偆偄偆傛偆側傢偗偱丄廃攇悢偼俉侽侽俫倸掱搙偵側偭偨偺偱偡偑丄栤戣偼俴偺婜娫偺挿偝偱偡丅
偙偺婜娫乮忋偺僆僔儘偱偺娤應寢壥偱偼侾俀兪倱乯偵偼丄偳偺傛偆側堄枴偑偁傞偺偱偟傚偆偐丅
偲偄偆偲偙傠偱丄杮擔偼帪娫偑柍偔側偭偰偟傑偄傑偟偨丅
偙偺懕偒偼丄傑偨師夞偵偄偨偟傑偡丅
俠俹倀傪偮偔傠偆両戞係俁係夞乮俀侽侾侽丏俀丏侾俁倳倫倢倧倎倓乯傪嵞曇廤
儚儞儃乕僪儅僀僐儞傪偮偔傠偆両乵戞俁夞乶
俀侽侾侾丏俇丏俀俇倳倫倢倧倎倓
慜傊
師傊
栚師傊栠傞
儂乕儉儁乕僕僩僢僾傊栠傞