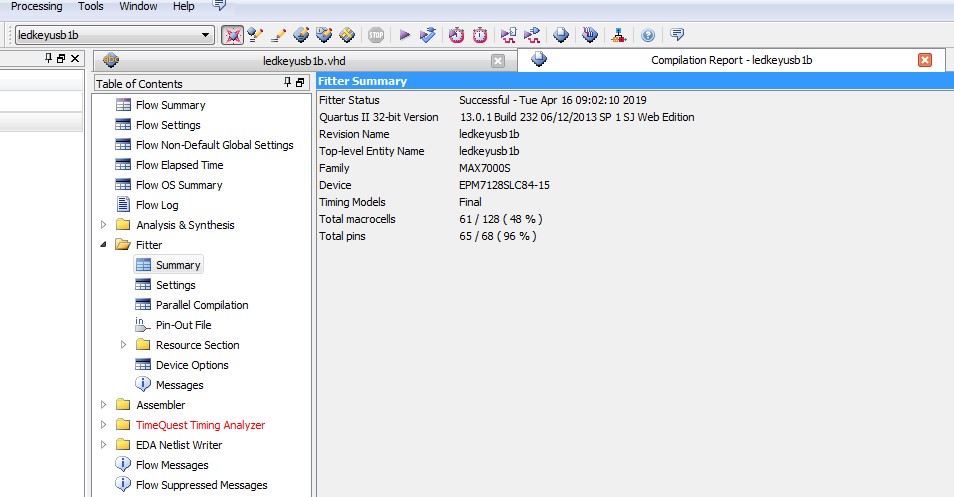
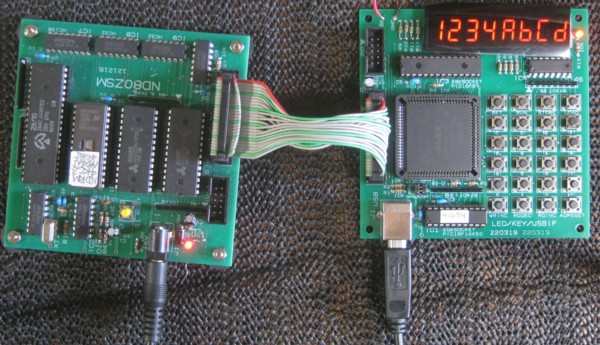
--7segx8 and 5x5 key usb interface 19/4/10
-- from ledkeyusb1a
-- 4/11 4/12 4/13 4/15 4/16
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
library ARITHMETIC;
use ARITHMETIC.std_logic_arith.all;
entity ledkeyusb1b is
PORT (
KEYOUT:out std_logic_vector(2 downto 0);
KEYIN:in std_logic_vector(7 downto 0);
AIN:in std_logic_vector(7 downto 0);
DINOUT:inout std_logic_vector(7 downto 0);
PIC16READ:in std_logic;
PIC16AD:in std_logic_vector(1 downto 0);
LDATAREADY:out std_logic;
LDATAOUT:out std_logic_vector(3 downto 0);
--PIC18RC:out std_logic_vector(7 downto 0);
--PIC18RB4:out std_logic;
--PIC18RB6:out std_logic;
RC3_RC0:inout std_logic_vector(3 downto 0);
RB6_RC4:in std_logic_vector(2 downto 0);
RC7_RC5:out std_logic_vector(2 downto 0);
--
USBON:in std_logic;
TKND:in std_logic;
P25:in std_logic;
PIC16RA3:in std_logic;--not used
CK12MIN:in std_logic;
RESETIN:in std_logic;
CK12MOUT:out std_logic;
CK12MOUT2:out std_logic;
RESETOUT:out std_logic;
P21:in std_logic;
P52:in std_logic;
P65:in std_logic;
P67:in std_logic;
P69:in std_logic;
IOR:in std_logic;
IOW:in std_logic);
end ledkeyusb1b;
architecture rtl of ledkeyusb1b is
signal ldtactiv:std_logic;
signal readyreset:std_logic;
signal ldatareadywk:std_logic;
signal keyoutbf:std_logic_vector(2 downto 0);
signal keyinbf:std_logic_vector(7 downto 0);
signal ledadrs:std_logic_vector(2 downto 0);
signal segment:std_logic_vector(7 downto 0);
signal rcwk:std_logic;
signal rcwk2:std_logic_vector(3 downto 0);
begin
--ledadrs & segment data set
process(AIN,IOW)
begin
if AIN(7 downto 3)="10001" and IOW='0' then
ldtactiv<='0';
else ldtactiv<='1';
end if;
end process;
process(ldtactiv)
begin
--
if PIC16READ='0' and PIC16AD="10" then
ldatareadywk<='1';
--
elsif ldtactiv'event and ldtactiv='1' then
ledadrs<=AIN(2 downto 0);
segment<=DINOUT;
ldatareadywk<='0';--
end if;
end process;
LDATAREADY<=ldatareadywk;
--ledadrs & segment data out
process(PIC16READ,PIC16AD)
begin
if PIC16READ='0' then
if PIC16AD="00" then
LDATAOUT<=segment(3 downto 0);
elsif PIC16AD="01" then
LDATAOUT<=segment(7 downto 4);
elsif PIC16AD="10" then
LDATAOUT(2 downto 0)<=ledadrs;
readyreset<='0';
else
LDATAOUT<="1111";
readyreset<='1';
end if;
end if;
end process;
--key in
process(AIN,IOW,IOR)
begin
if AIN(7 downto 2)="100111" and IOW='0' then
DINOUT<="ZZZZZZZZ";
if DINOUT(0)='1' then
keyoutbf(0)<='Z';
elsif DINOUT(0)='0' then
keyoutbf(0)<='0';
end if;
if DINOUT(1)='1' then
keyoutbf(1)<='Z';
elsif DINOUT(1)='0' then
keyoutbf(1)<='0';
end if;
if DINOUT(2)='1' then
keyoutbf(2)<='Z';
elsif DINOUT(2)='0' then
keyoutbf(2)<='0';
end if;
elsif AIN(7 downto 2)="100111" and IOR='0' then
keyinbf<=KEYIN;
DINOUT<=keyinbf;
elsif AIN(7 downto 2)="100101" and IOR='0' then
DINOUT(7)<=TKND;
--USB PIC to CPU
if USBON='0' then
DINOUT(6 downto 4)<=RB6_RC4;
DINOUT(3 downto 0)<=RC3_RC0;
end if;
else
DINOUT<="ZZZZZZZZ";
end if;
end process;
--USB CPU to PIC
process(IOW)
begin
if AIN(7 downto 2)="100110" and IOW='0' then
rcwk<=DINOUT(3);
RC7_RC5<=DINOUT(2 downto 0);
elsif AIN(7 downto 2)="100101" and IOW= '0' then
rcwk2<=DINOUT(3 downto 0);
end if;
end process;
process(rcwk)
begin
if rcwk= '0' then
RC3_RC0<=rcwk2;
else
RC3_RC0<="ZZZZ";
end if;
end process;
--
KEYOUT<=keyoutbf;
CK12MOUT<=CK12MIN;
CK12MOUT2<=CK12MIN;
RESETOUT<=RESETIN;
-- PIC18RB6<=ldtactiv;
-- PIC18RC(2 downto 0)<=ledadrs;
end rtl;
|